人形機器人的產業化之路面臨諸多挑戰,其中,核心零部件的性能優化與成本控制是制約其發展的關鍵瓶頸之一。目前全球市場人形機器人正向輕量化、實用化、高可靠性和低成本化發展與進步,這便離不開精密零件、新型材料、AI算法以及系統集成這四大核心技術的支撐。
一、超輕量一體化關節
作為仿人型機器人動力域的核心執行單元,人形機器人動力系統的“心臟”,一體化關節模組承載著精密傳動、動態響應及能量優化的三重使命,對于推動人形機器人產業化進程具有重要影響。在人形機器人的構造中,關節的性能直接決定了人形機器人的運動精度、速度和靈活性。關節的高集成設計和精密制造涉及到多個領域的先進技術,其制造工藝復雜,對材料和加工精度要求極高,使得其成本居高不下。據行業權威機構測算,一體化伺服關節模組在人形機器人總成本中的占比高達50%以上,是名副其實的價值核心。其量產良率與成本控制已成為當前產業化的關鍵破局點。

機器人關節模組行業發展趨勢之一是智能化和集成化。隨著傳感器技術、控制技術和人工智能技術的不斷進步,關節模組將具備更高的自主感知和決策能力,能夠適應更復雜的工作環境和任務需求。
超輕量化則是關節模組的另一個顯著的發展趨勢,隨著材料科學和制造工藝的進步,關節模組采用更輕便的材料和結構設計,以降低機器人的整體重量,提高其運動效率和能源利用率。輕量化設計對于提升機器人的動態性能和適應性具有重要意義,尤其是在航空航天、物流搬運等領域。
在此背景下,四川天鏈機器人憑借其20余年在機器人行業積累的豐富經驗,依托于核心的諧波減速機正向研發技術,在內嵌式伺服電機結構設計上進行了一系列優化,創新性的將伺服電機與特制諧波減速機高度集成。從磁場、定子繞組、轉子慣量到結構拓撲,全方位著手,成功提高了電機扭矩密度,同時降低了轉子慣量,在極小的體積與重量下集成了高精度輸入輸出編碼器、輸出扭力傳感器(直接測力)、制動器、驅控、溫度傳感器等功能單元,具有極高的扭矩與體積重量比。同時巧妙地把電機與波發生器結合在一起,有效精簡零件數量,最終推出了關節扭矩密度高達450Nm 的超輕量一體化關節,擁有多項專利技術,實現了產品體積和重量的大幅縮減。

相較于市面上普通同型號關節產品,重量減輕50%,體積減小約50%,扭矩提升約50%,關節主體結構具備IP54防護等級(特殊定制機型可達到IP67),可實現360度連續旋轉,極大地拓展應用范圍,專攻對機器人輕量化有極致追求的應用場景。極大地簡化了系統結構,全面提升了整體性能。能夠確保在各種嚴苛工況下穩定可靠運行,為人形機器人實現靈活、精準的運動提供了強有力的技術保障。

二、超輕量協作機器人
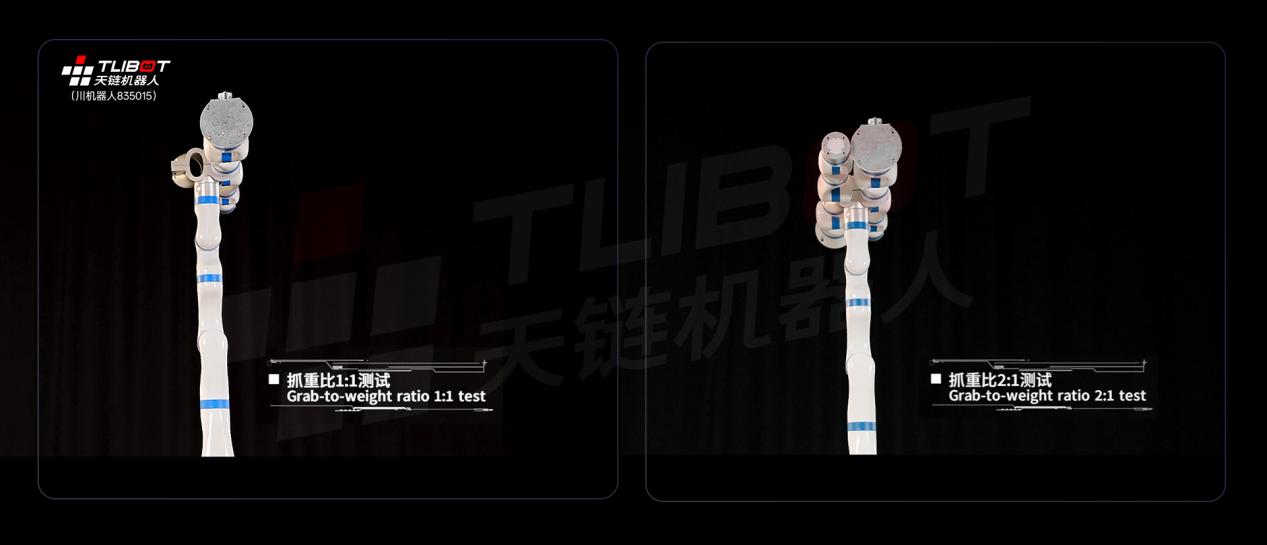
基于一體化關節的底層技術突破,天鏈同步推出抓重比2:1的超輕量協作機器人,本體重8公斤左右,有效工作半徑600mm,全臂展可以額定抓取10公斤,極限抓取重量甚至超過15公斤,超自重2倍。
該機械臂每個關節均含制動器,集成感知能力、關節力矩傳感器、電流估算力反饋模型、3D視覺等技術,具有全隱藏線束、拖拽示教、力反饋及超高功率密度等特點,本體輕盈小巧,是未來工業智能化、協作化、數字化的代表,應用場景豐富,滿足無人配送、無人售賣、餐飲食品制作、醫療護理及農產品采摘等新興自動化市場需求。

四川天鏈機器人公司擁有近200余項專利,其中發明專利75項。多年持續深耕機器人核心技術,形成了自研自產的全棧式生態鏈路。未來將繼續深耕人形機器人及機器人核心零部件的研發、生產,并且為客戶提供機器人技術服務和相關行業化解決方案。
免責聲明:以上內容為本網站轉自其它媒體,相關信息僅為傳遞更多信息之目的,不代表本網觀點,亦不代表本網站贊同其觀點或證實其內容的真實性。如稿件版權單位或個人不想在本網發布,可與本網聯系,本網視情況可立即將其撤除。
鄭重聲明:本文版權歸原作者所有,轉載文章僅為傳播更多信息之目的,如作者信息標記有誤,請第一時間聯系我們修改或刪除,多謝。



